地图
leetcode
QLC
脑电
题解
PID
OTA
数学
博通蓝牙使能
信号量
Semaphore
浏览器选择建议
pthread
自定义类型
控制浏览器的方式
dmidecode
无痕模式
头文件查找方式
mes
空时自适应处理技术
Planning
2024/4/13 9:32:15
【Apollo学习笔记】—— Planning模块
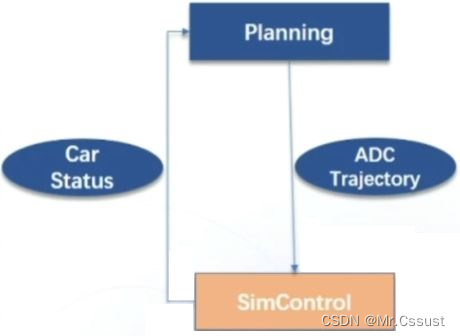
前言 本文记录学习planning模块时的一些笔记,总体流程参照https://zhuanlan.zhihu.com/p/61982682中的流程图,如上图所示。 planning_component
modules/planning/planning_component.cc
PlanningComponent::Init部分首先完成规划模式的选择ÿ…

【Apollo学习笔记】——规划模块TASK之SPEED_BOUNDS_PRIORI_DECIDER
文章目录 前言SPEED_BOUNDS_PRIORI_DECIDER功能简介SPEED_BOUNDS_PRIORI_DECIDER相关配置SPEED_BOUNDS_PRIORI_DECIDER流程将障碍物映射到ST图中ComputeSTBoundary(PathDecision* path_decision)ComputeSTBoundary(Obstacle* obstacle)GetOverlapBoundaryPointsComputeSTBounda…
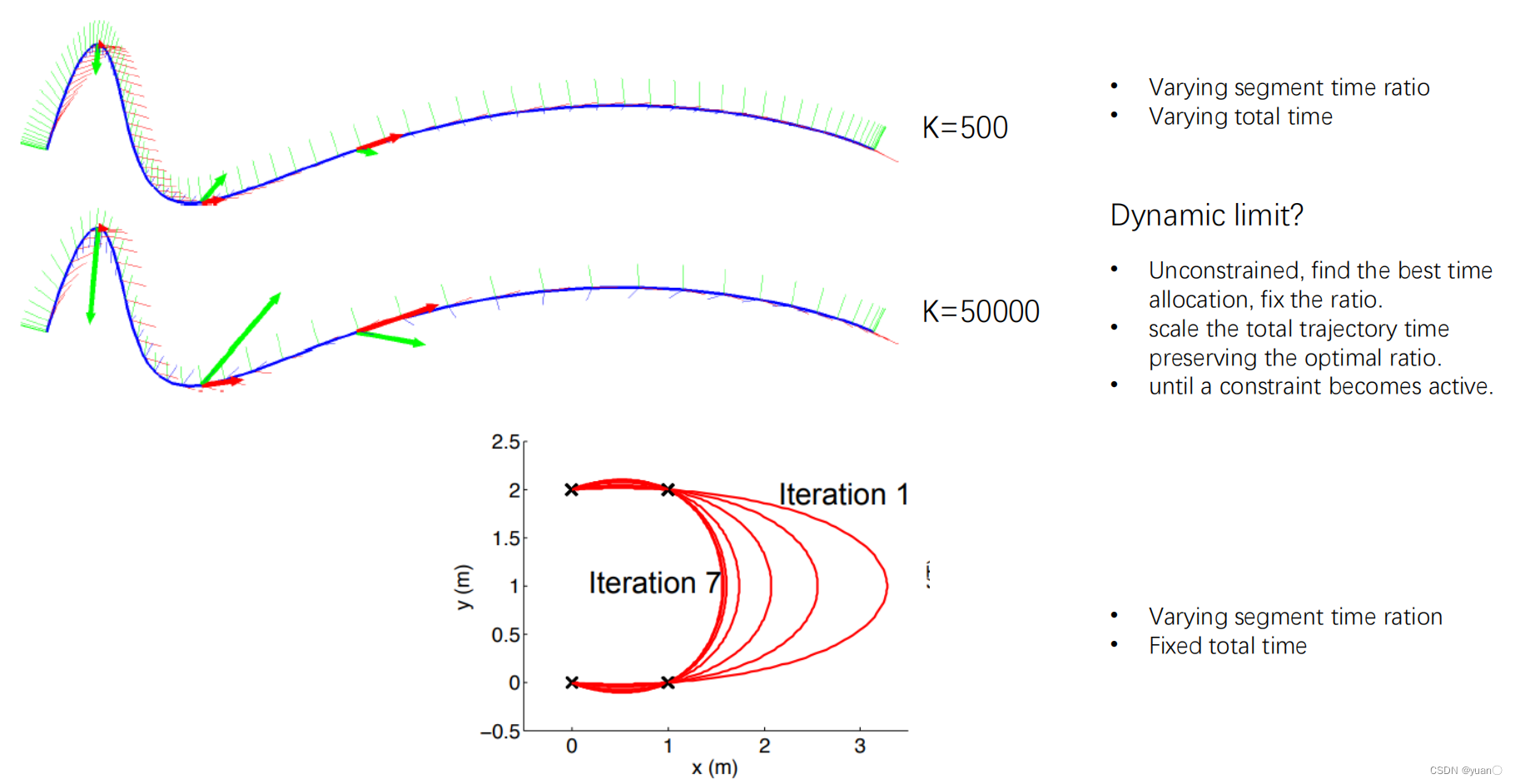
【移动机器人运动规划】04 ——轨迹生成
文章目录 前言相关代码整理: 介绍Minimum Snap OptimizationDifferential Flatness(微分平坦)Minimum-snapSmooth 1D TrajectorySmooth Multi-Segment TrajectoryOptimization-based Trajectory Generation Convex Optimization(凸优化)凸函数和凸集凸优…

自动驾驶学习笔记(十九)——Planning模块
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo 社区开发者圆桌会》免费报名—>传送门
文章目录
前言
Planning作用
Planning内容
Plannin…

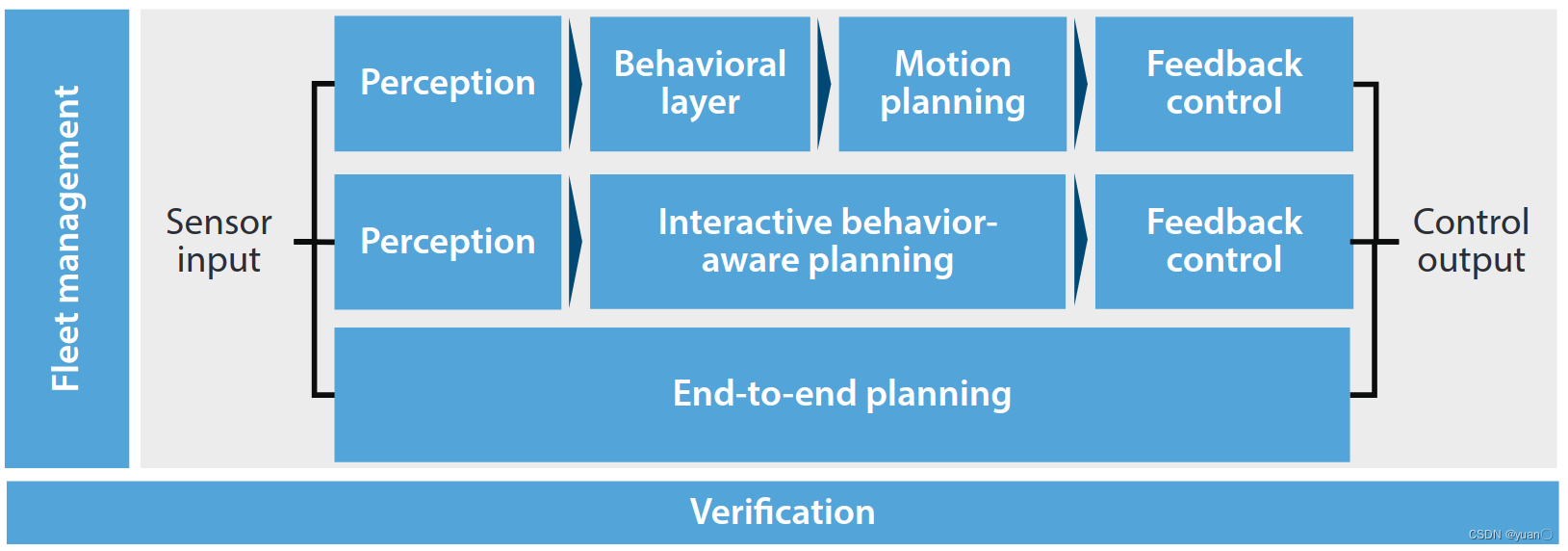
【论文笔记】A Review of Motion Planning for Highway Autonomous Driving
文章目录 I. INTRODUCTIONII. CONSIDERATIONS FOR HIGHWAY MOTION PLANNINGA. TerminologyB. Motion Planning SchemeC. Specificities of Highway DrivingD. Constraints on Highway DrivingE. What Is at Stake in this Paper III. STATE OF THE ARTA. Taxonomy DescriptionB…
【论文笔记】Planning and Decision-Making for Autonomous Vehicles
文章目录 Summary1. INTRODUCTION2. MOTION PLANNING AND CONTROL2.1. Vehicle Dynamics and Control2.2. Parallel Autonomy2.3. Motion Planning for Autonomous Vehicles 3. INTEGRATED PERCEPTION AND PLANNING3.1. From Classical Perception to Current Challenges in Ne…
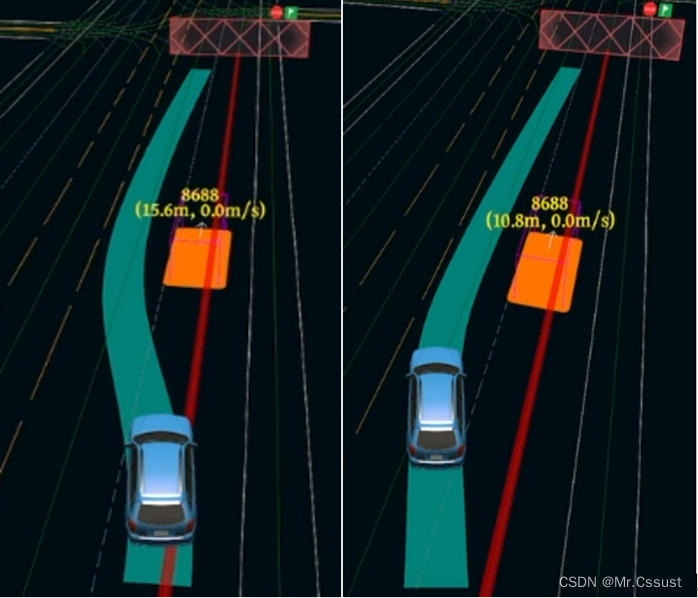
自动驾驶学习笔记(五)——绕行距离调试
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《2023星火培训【感知专项营】》免费课程—>传送门 文章目录
前言
调试内容
打开在线编辑器
打开pl…

【Apollo学习笔记】——规划模块TASK之RULE_BASED_STOP_DECIDER
文章目录 前言RULE_BASED_STOP_DECIDER相关配置RULE_BASED_STOP_DECIDER总体流程StopOnSidePassCheckClearDoneCheckSidePassStopIsPerceptionBlockedIsClearToChangeLaneCheckSidePassStopBuildStopDecisionELSE:涉及到的一些其他函数NormalizeAngleSelfRotate CheckLaneChang…
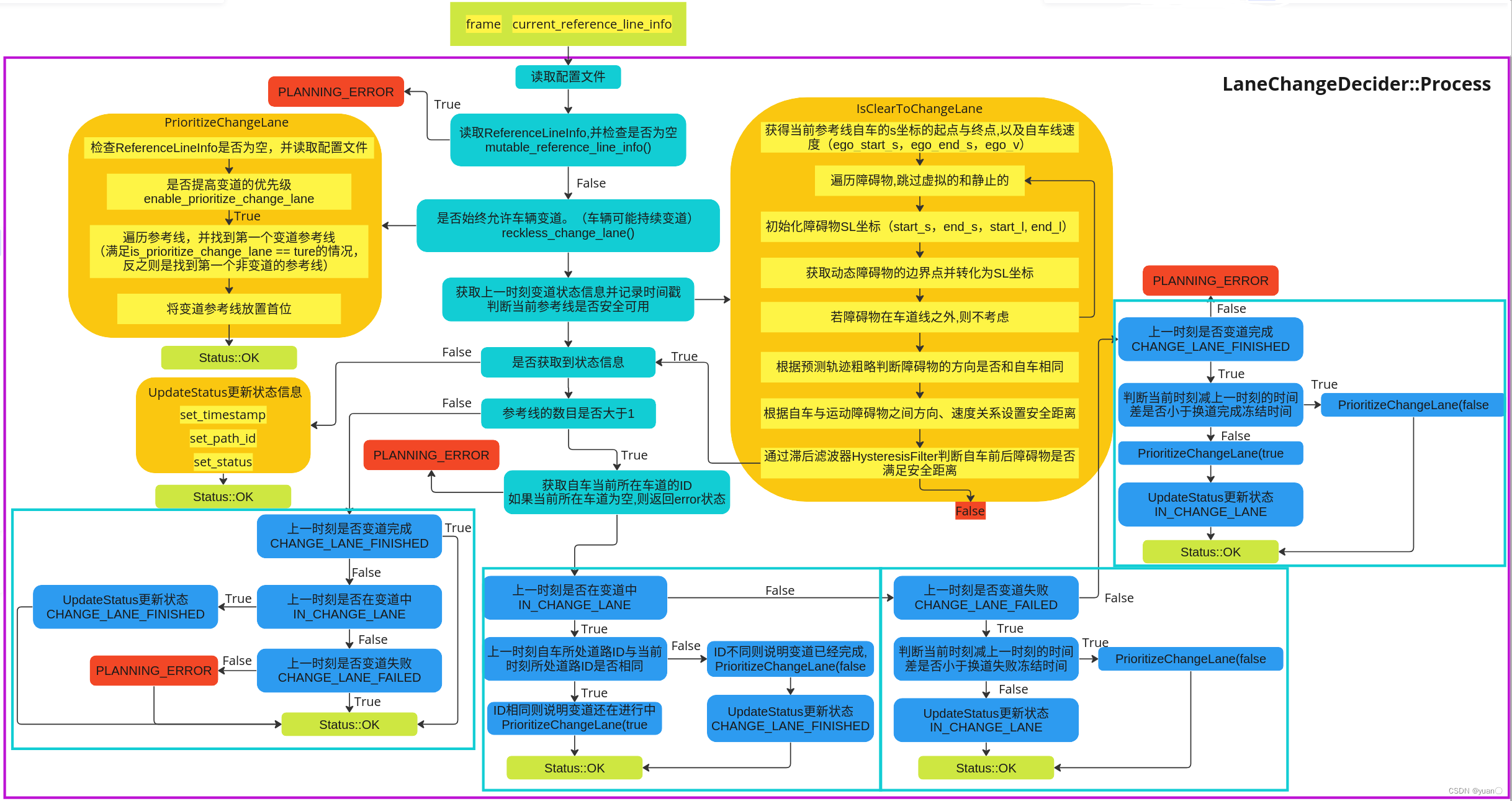
【Apollo学习笔记】——规划模块TASK之LANE_CHANGE_DECIDER
文章目录 前言LANE_CHANGE_DECIDER功能简介LANE_CHANGE_DECIDER相关配置LANE_CHANGE_DECIDER总体流程LANE_CHANGE_DECIDER相关子函数PrioritizeChangeLaneUpdateStatusIsClearToChangeLaneHysteresisFilter 参考 前言
在Apollo星火计划学习笔记——Apollo路径规划算法原理与实…

【Apollo学习笔记】——规划模块TASK之PATH_REUSE_DECIDER
文章目录 前言PATH_REUSE_DECIDER功能简介PATH_REUSE_DECIDER相关配置PATH_REUSE_DECIDER总体流程PATH_REUSE_DECIDER相关子函数IsCollisionFreeTrimHistoryPathIsIgnoredBlockingObstacle和GetBlockingObstacleS Else参考 前言
在Apollo星火计划学习笔记——Apollo路径规划算…

PonyAi Planning-横纵向轨迹规划
PonyAi Planning-横纵向轨迹规划
轨迹规划的探索和挑战
轨迹规划的概念安全舒适两不误:探讨优化算法在规划控制中的应用 轨迹规划的概念
决策
横向规划
纵向规划
优化算法在规划(Planning)中的应用 附赠自动驾驶学习资料和量产经验…
自动驾驶学习笔记(二十)——Planning算法
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo 社区开发者圆桌会》免费报名—>传送门
文章目录
前言
参考线平滑
双层状态机
EM Planner …
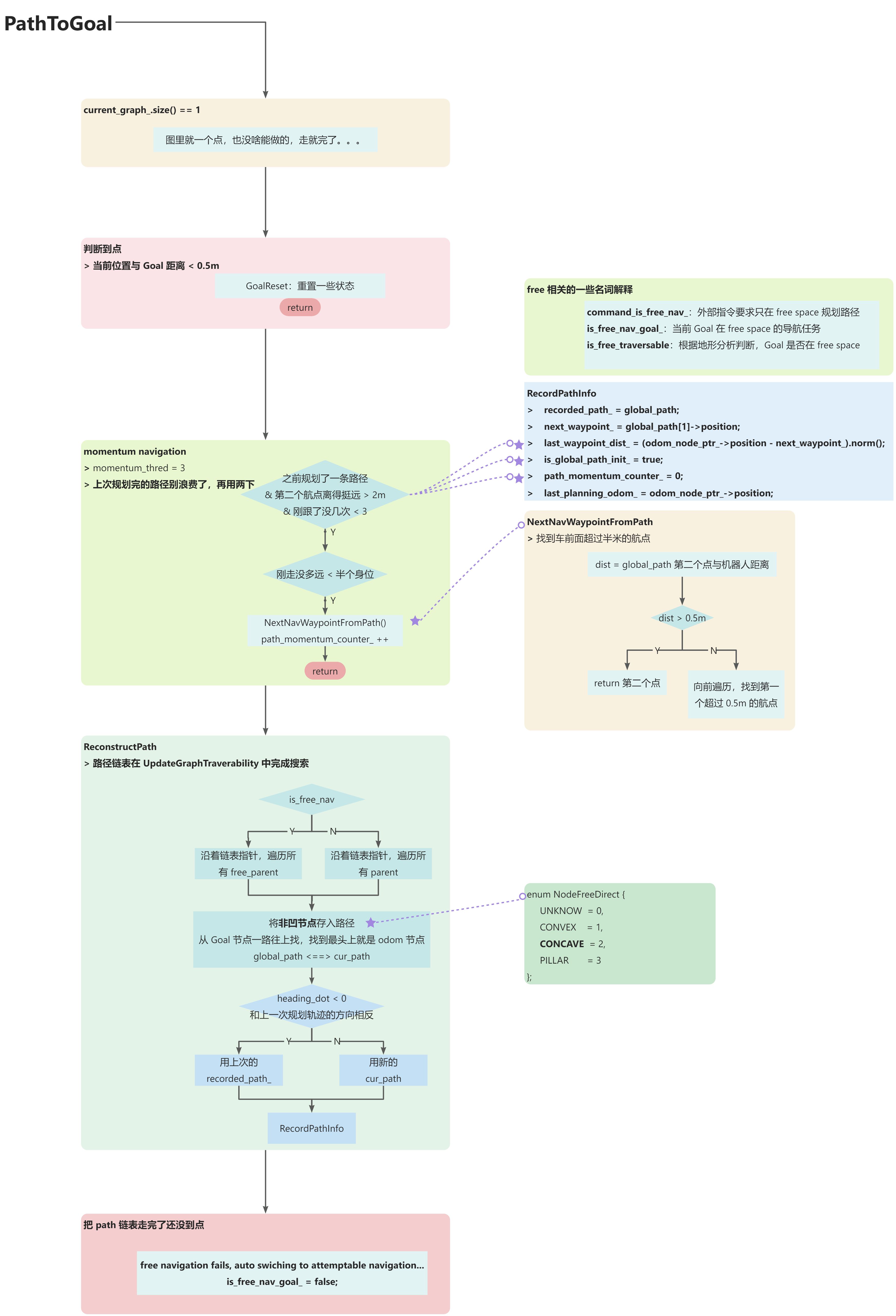
CMU - FarPlanning 代码速读
https://github.com/MichaelFYang/far_planner https://www.cmu-exploration.com/ 系统结构 Far Planner 属于 High-level planning module,进行全局规划,找到可行路径;将 way_point发布给 Local planner和 path following KeyPoint Local-la…

【Apollo学习笔记】——规划模块TASK之PATH_DECIDER
文章目录 前言PATH_DECIDER功能简介PATH_DECIDER相关配置PATH_DECIDER总体流程路径决策代码流程及框架MakeStaticObstacleDecision PATH_DECIDER相关子函数参考 前言
在Apollo星火计划学习笔记——Apollo路径规划算法原理与实践与【Apollo学习笔记】——Planning模块讲到……S…
【AI视野·今日Robot 机器人论文速览 第七十八期】Wed, 17 Jan 2024
AI视野今日CS.Robotics 机器人学论文速览 Wed, 17 Jan 2024 Totally 49 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
Safe Mission-Level Path Planning for Exploration of Lunar Shadowed Regions by a Solar-Powered Rover Authors Olivier L…
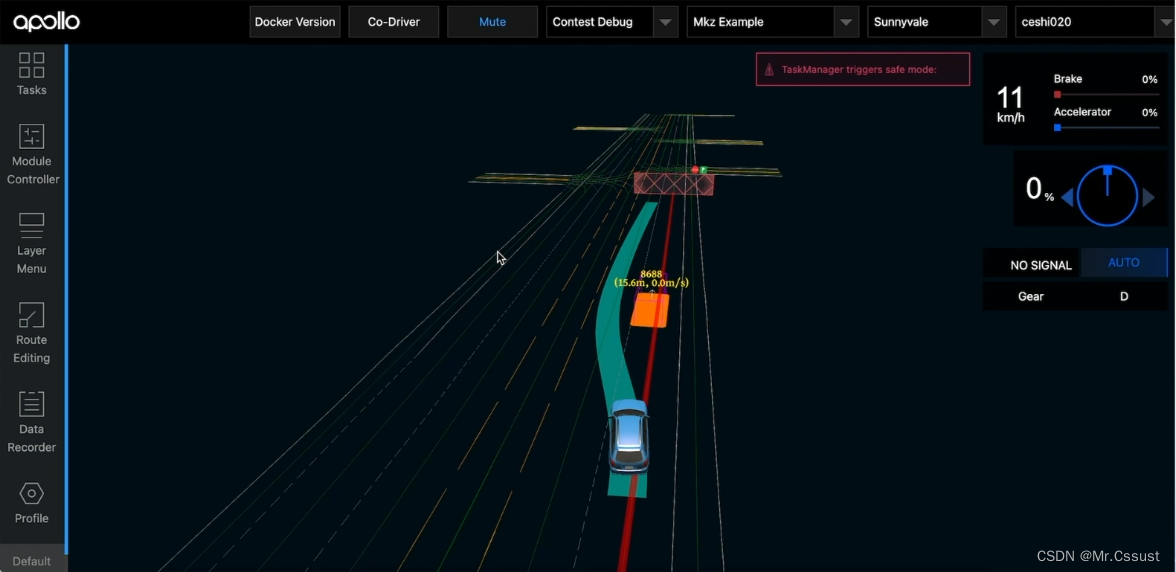
自动驾驶学习笔记(四)——变道绕行仿真
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《2023星火培训【感知专项营】》免费课程—>传送门 文章目录
前言
仿真内容
启动Dreamview
开启Sim…
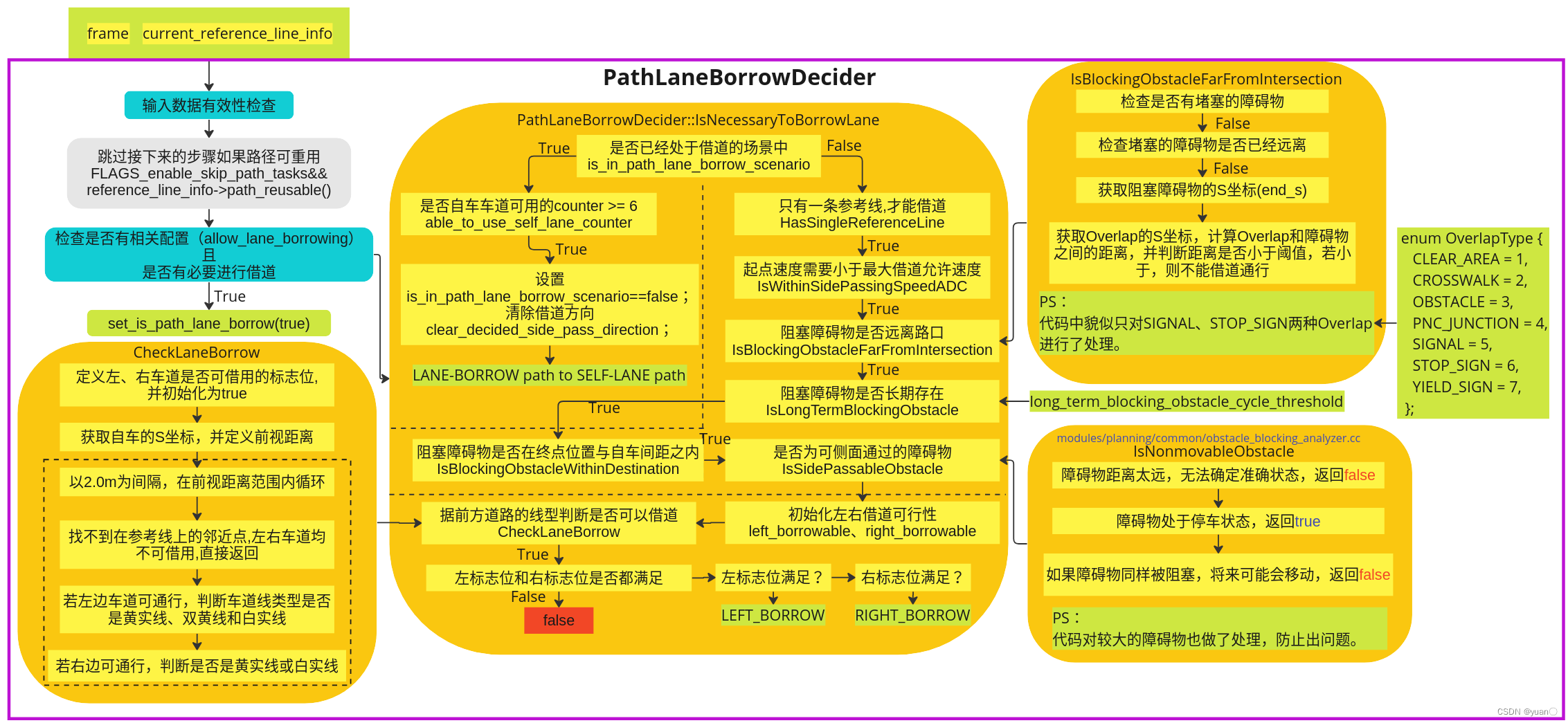
【Apollo学习笔记】——规划模块TASK之PATH_BORROW_DECIDER
文章目录 前言PATH_BORROW_DECIDER功能简介PATH_BORROW_DECIDER相关配置PATH_BORROW_DECIDER总体流程PATH_BORROW_DECIDER相关子函数IsNecessaryToBorrowLaneIsBlockingObstacleFarFromIntersectionIsNonmovableObstacleCheckLaneBorrow 参考 前言
在Apollo星火计划学习笔记—…
【Apollo学习笔记】——规划模块TASK之SPEED_BOUNDS_PRIORI_DECIDERSPEED_BOUNDS_FINAL_DECIDER
文章目录 前言SPEED_BOUNDS_PRIORI_DECIDER功能简介SPEED_BOUNDS_FINAL_DECIDER功能简介SPEED_BOUNDS_PRIORI_DECIDER相关配置SPEED_BOUNDS_FINAL_DECIDER相关配置SPEED_BOUNDS_DECIDER流程将障碍物映射到ST图中ComputeSTBoundary(PathDecision* path_decision)ComputeSTBounda…
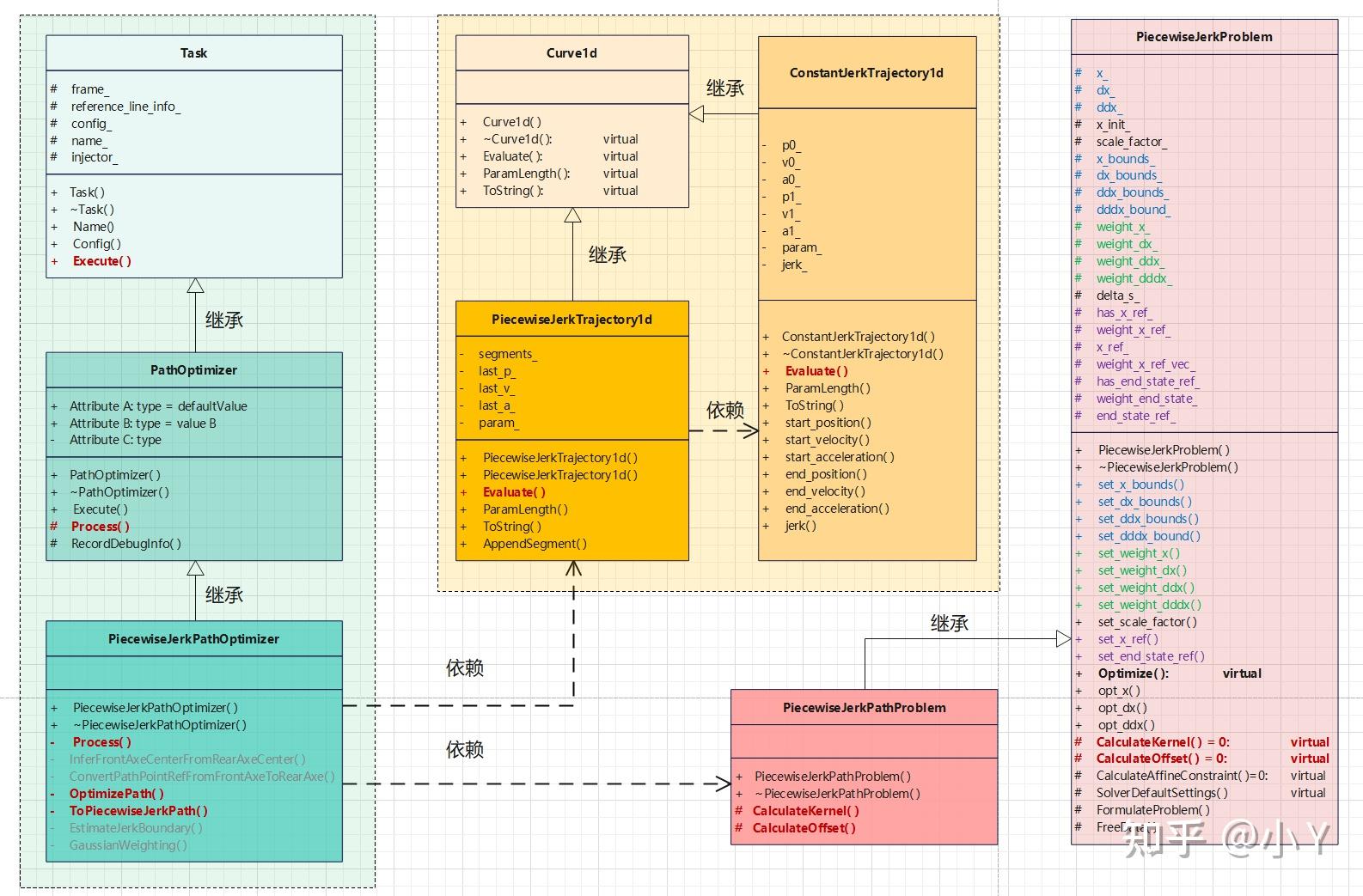
【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_PATH_OPTIMIZER
文章目录 前言PIECEWISE_JERK_PATH_OPTIMIZER功能简介PIECEWISE_JERK_PATH_OPTIMIZER相关配置PIECEWISE_JERK_PATH_OPTIMIZER总体流程OptimizePathpiecewise_jerk_problem二次规划问题标准形式定义优化变量定义目标函数设计约束OptimizeFormulateProblem计算QP系数矩阵Calculat…

【Apollo学习笔记】——规划模块TASK之PATH_ASSESSMENT_DECIDER
文章目录 前言PATH_ASSESSMENT_DECIDER功能简介PATH_ASSESSMENT_DECIDER相关信息PATH_ASSESSMENT_DECIDER总体流程1. 去除无效路径2. 分析并加入重要信息给speed决策SetPathInfoSetPathPointType 3. 排序选择最优的路径4. 更新必要的信息 前言
在Apollo星火计划学习笔记——Ap…